基于睿擎派轻松玩转CANopen电机控制

在工业自动化领域,稳定高效的设备间通信是核心。CANopen协议凭借其可靠性,成为众多工业设备(如伺服电机)的首选通信标准。今天,我们就来展示如何利用RT-Thread睿擎工业开发平台,快速构建一个CANopen主机系统,实现对电机的启停控制!无需复杂底层开发,睿擎平台助你轻松迈入工业通信大门。
一、场景聚焦:让电机听你指挥
你手头有一台支持CANopen协议的工业电机(例如我们演示中使用的TLC42C-24V-04两相42闭环一体机),如何让你的开发板成为它的“指挥官”,精准地发送启动、停止指令?这正是睿擎平台擅长的领域!
二、利器在手:RT-Thread睿擎工业开发平台
睿擎平台不仅提供了强大的实时操作系统内核,更深度集成了丰富的工业总线协议栈(包括CANopen!)。这意味着开发者可以:
1.告别底层协议栈的繁琐移植与调试:CANopen协议栈已深度集成,开箱即用。
2.聚焦应用逻辑:将精力放在如何控制设备、实现业务逻辑上,而非通信细节。
3.享受RT-Thread生态优势:丰富的组件、易用的开发环境(RuiChing Studio IDE)、活跃的社区支持。
三、实战演练:启停控制,So Easy!
我们以控制电机启停为例,展示睿擎平台实现CANopen通信的便捷性。以下是核心步骤概览:
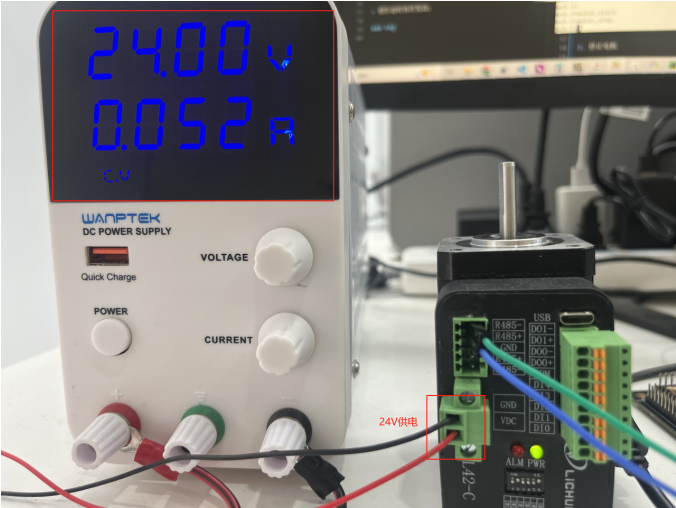
1.硬件准备:睿擎派开发板(作为CANopen主机)。
a.TLC42C-24V-04电机(作为CANopen从机,站号设置为2)。
b.关键配置:电机波特率设置为1Mbps。站号开关配置如下(确保匹配):
SW1: OFF
i.SW2: ON
ii.SW3: OFF
iii.SW4: OFF
iv.SW5: OFF
v.SW6: ON
c.硬件连接:使用CAN线缆将开发板的CAN接口与电机的CAN接口可靠连接。同时,确保为电机接入正确的电源。
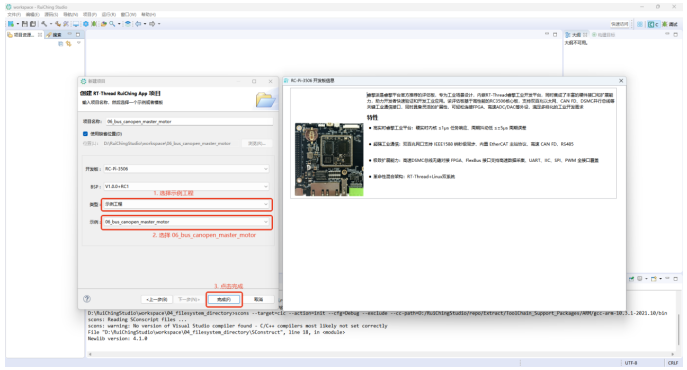
2.工程创建:打开RuiChing Studio IDE。
a.选择内置的 **06_bus_canopen_master_motor** 示例工程。这个工程已经包含了CANopen主机控制电机的基础框架。
3.核心代码解析: 协议栈初始化(master402_canopen.c): 简洁的代码即可完成CANopen协议栈的启动和配置。
a.硬件驱动与接收线程(canopen_rtthread.c): RT-Thread的CAN驱动抽象层和线程机制,让底层通信处理变得清晰高效。
b.PDO配置与映射: 示例中演示了如何在“预操作状态”下,使用SDO指令配置PDO通信参数和映射表,为高效的过程数据交换做好准备。
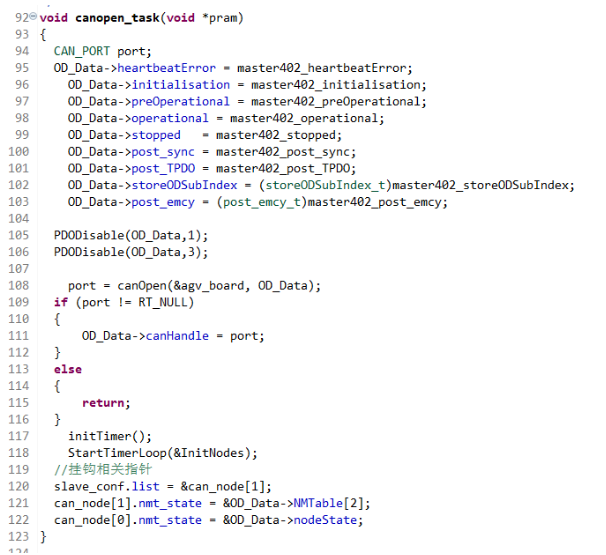
c.状态切换: 配置节点保护超时时间,并通过发送NMT指令,将从机状态从“预操作”切换到“操作”状态,准备接收控制命令。
4.编译与运行:在IDE中一键编译示例工程,确认成功。
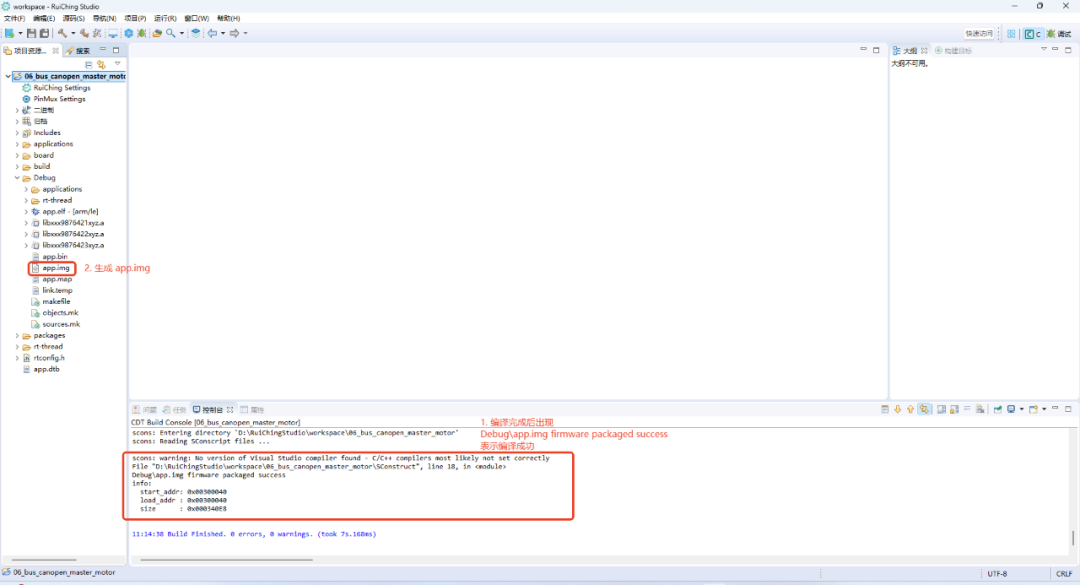
a.连接开发板,调试运行程序。
b.在终端(如MSH命令行)中体验控制:输入 **canopen_start** :初始化CANopen协议栈,建立通信。
i.输入 **motor_start:发送指令,启动电机!**
ii.输入 **motor stop:发送指令,停止电机!**
四、为何选择睿擎平台?
开箱即用的工业协议栈: CANopen等主流工业协议深度集成,大幅缩短开发周期。
稳定可靠的实时内核: 确保工业控制任务的实时性和确定性。
完善的开发工具链: RuiChing Studio IDE提供从编码、编译、调试到部署的一站式体验。
活跃的社区与丰富资源: 遇到问题?海量教程、文档和社区开发者为你提供支持。
结语
从硬件连接到指令控制,睿擎平台让实现CANopen通信变得简单。06_bus_canopen_master_motor示例只是一个起点,基于此,你可以轻松扩展功能,实现更复杂的运动控制、状态监控等工业应用。
相关文章
-
选购电池箱气密性检测仪,这些陷阱要避开-岳信仪器
-
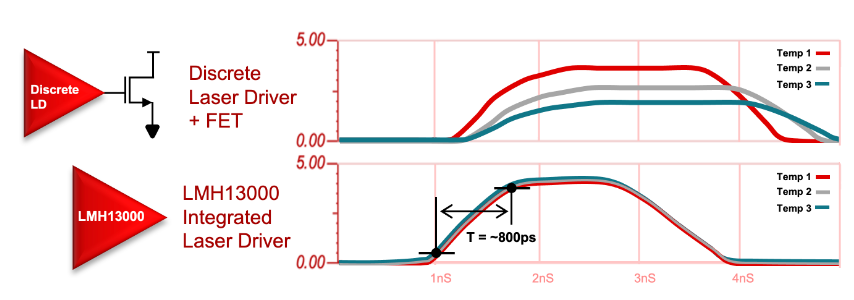
基于德州仪器LMH13000打造下一代激光雷达系统
-
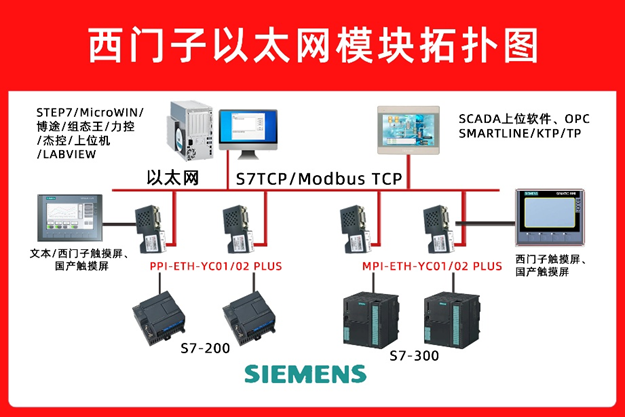
西门子SMARTS7-200PLC与S7-1500PLC以太网通讯及PPI集成实现分布式IO控制
-
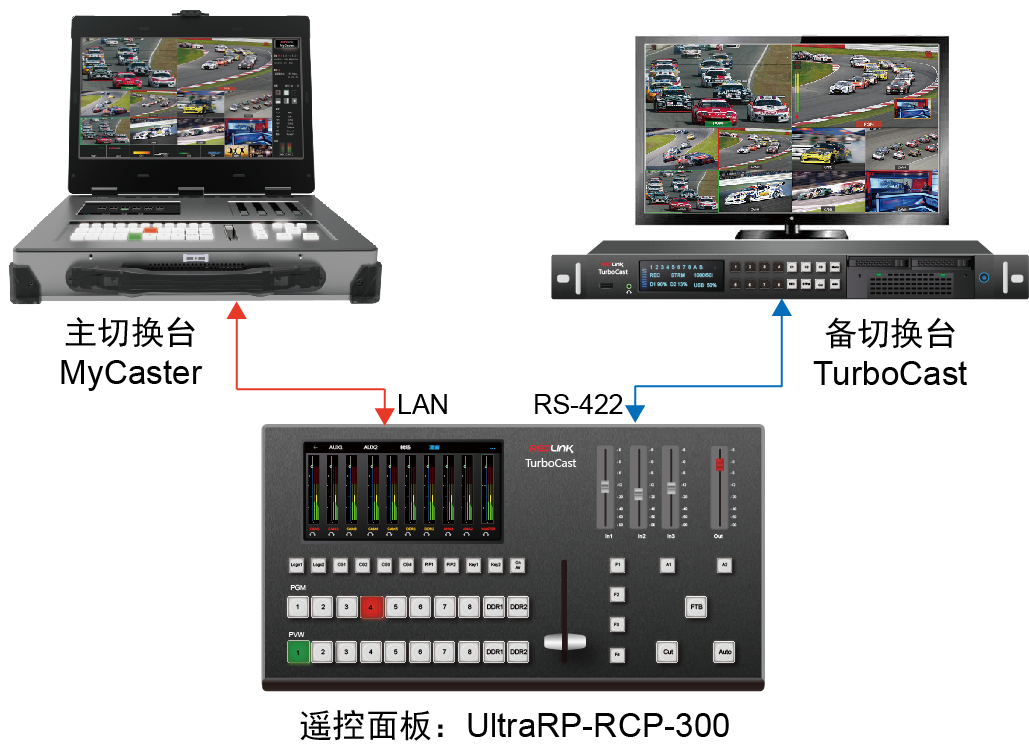
突破影音录播设备存储瓶颈!ICY DOCK 高密度硬盘抽取盒提升制作效率
-
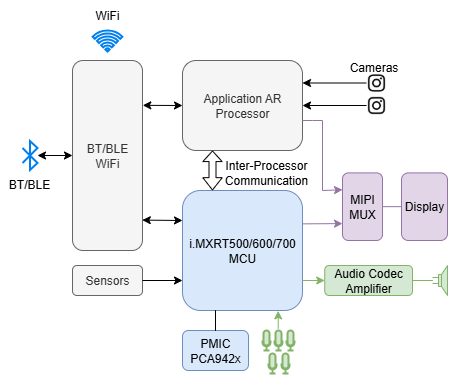
使用恩智浦处理器应对AI智能眼镜低功耗设计挑战
-

动环监控/储能EMS设备推荐,构筑高可靠数据采集与通信基石的英康仕1U工控机精选方案
-
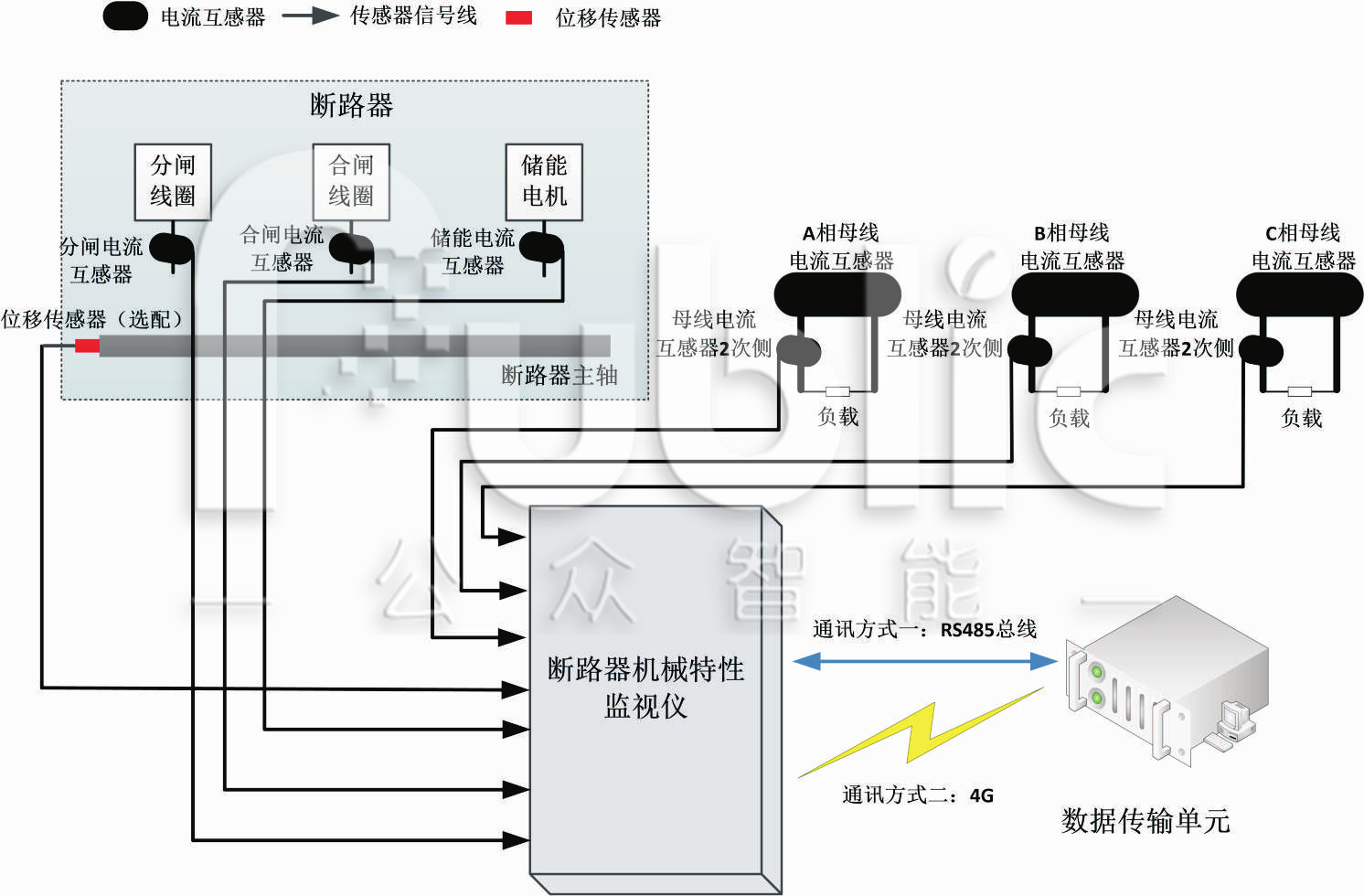
断路器机械特性在线监测是一种怎样的技术?
-
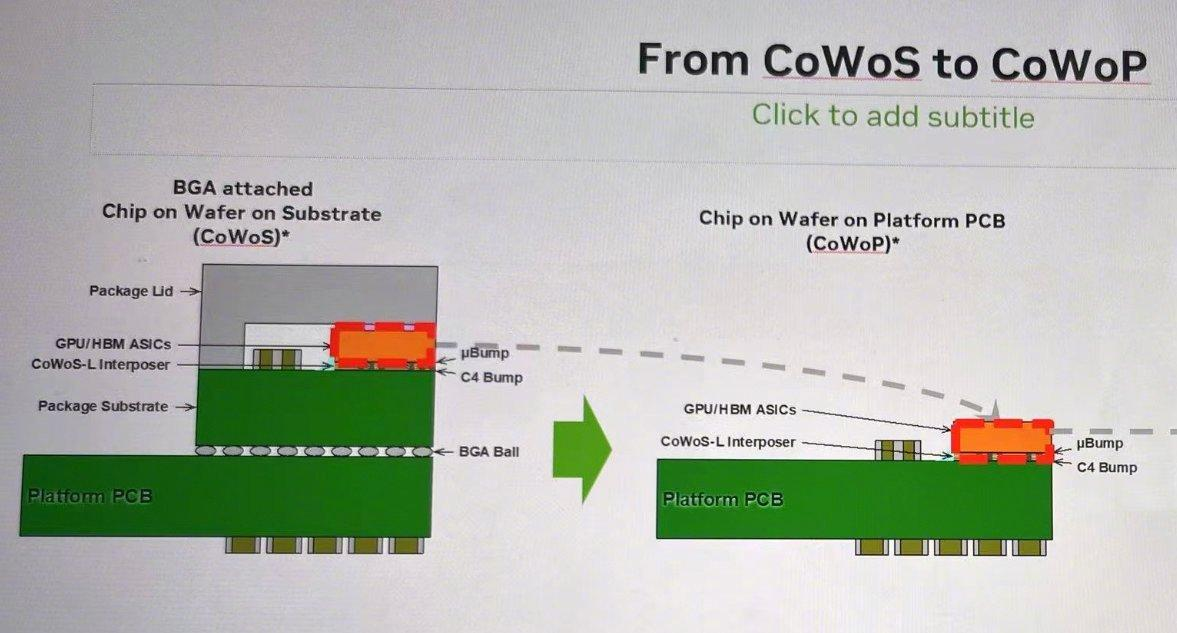
最近大火的CoWoP跟CoWoS、CoPoS有什么区别?


